
What is Uniform-Cost Search?
Uniform-Cost Search is a search algorithm used when actions have different costs — that is, when moving from one state to another does not always cost the same (unlike BFS).
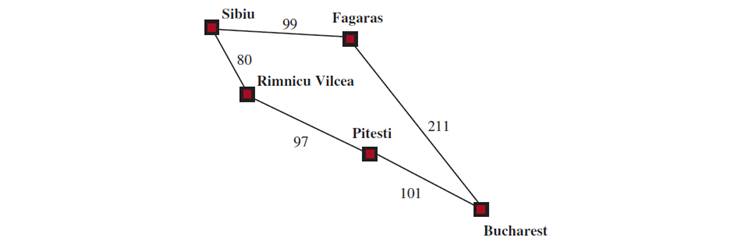
Example — Romania Map (from Figure )
We want to go from Sibiu → Bucharest.
Connections and their costs (distances):
| From | To | Cost |
| Sibiu | Rimnicu Vilcea | 80 |
| Sibiu | Fagaras | 99 |
| Rimnicu Vilcea | Pitesti | 97 |
| Fagaras | Bucharest | 211 |
| Pitesti | Bucharest | 101 |
Step-by-Step Explanation
Step 1: Start from Sibiu
Successors:
- Rimnicu Vilcea (cost = 80)
- Fagaras (cost = 99)
The lowest-cost node is Rimnicu Vilcea (80).
Step 2: Expand Rimnicu Vilcea
From Rimnicu Vilcea → Pitesti
New cost = 80 + 97 = 177
Now we have these paths in the frontier:
- Fagaras (cost 99)
- Pitesti (cost 177)
The least-cost node is Fagaras (99).
Step 3: Expand Fagaras
From Fagaras → Bucharest
New cost = 99 + 211 = 310
Now the frontier has:
- Pitesti (177)
- Bucharest (310)
Even though Bucharest is the goal, we do not stop yet.
Uniform-Cost Search checks for a goal only when expanding a node, not when generating one.
So, next we expand Pitesti (177) because it’s cheaper.
Step 4: Expand Pitesti
From Pitesti → Bucharest
New cost=177+101=278
That is
Now we have a better path to Bucharest than before (278 < 310).
So UCS replaces the previous higher-cost path.
Step 5: Expand Bucharest (278)
Now Bucharest is the lowest-cost node in the frontier, and it’s the goal.
Algorithm stops.
The path found (via Rimnicu Vilcea → Pitesti) is the optimal (lowest cost) path.
Key Idea
Uniform-Cost Search expands nodes in order of increasing path cost
—not by depth (like BFS), and not by heuristic (like A*).
Complexity
Let:
- C* = cost of the optimal solution (smallest total path cost)
- ε = smallest positive step cost
Then:
This means UCS can explore many low-cost paths before finding the right one.
When all step costs are equal (like 1 per move), UCS behaves just like BFS.
Properties of Uniform-Cost Search
| Property | Description |
| Complete | Yes, it always finds a solution if one exists (assuming positive costs). |
| Optimal | Yes, it always finds the least-cost path. |
| Time & Space | Can be large (depends on cost distribution). |
| Type | Uninformed search (no heuristic). |